

|
|
|
|
Câblage 7° partie : Pont tournant Roco 42615 |
| Un
second chapitre traitant de la peinture et de la patine est disponible
sur la page Décor / Pont
tournant |
|
Il n'est plus nécessaire de présenter le pont tournant Roco, largement répandu sur les réseaux en HO. Néanmoins, il me paraissait intéressant de présenter son installation ainsi que son circuit de commande. En effet, bien que cette commande soit prévue dans le kit, j'y ai apporté quelques modifications afin de la rendre encastrable. La commande qui est ici présentée s'inspire largement du principe original. Après de multiples essais, j'ai abandonné l'idée de commander le pont tournant avec un système de programmation de sa position. En effet, la piètre qualité des contacts "de position" ne permet pas une commande fiable. La notice détaillée de ce pont tournant est disponible sur la page : Téléchargement Pdf dans la rubrique "Notices" |
 |
| Le démontage du pont est nécessaire si on veut comprendre son fonctionnement et surtout permet de faciliter sa peinture et patine. |
 |
| |
|
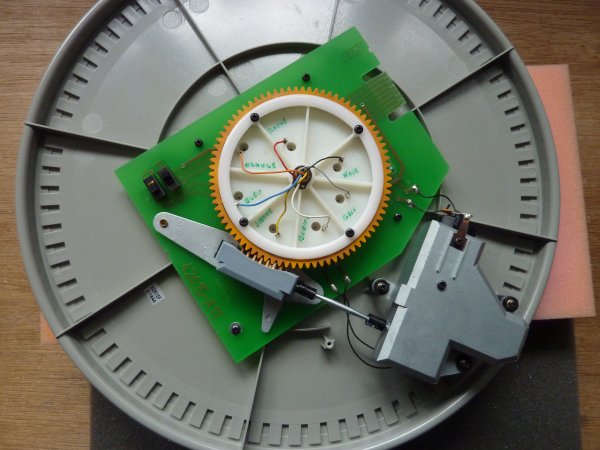
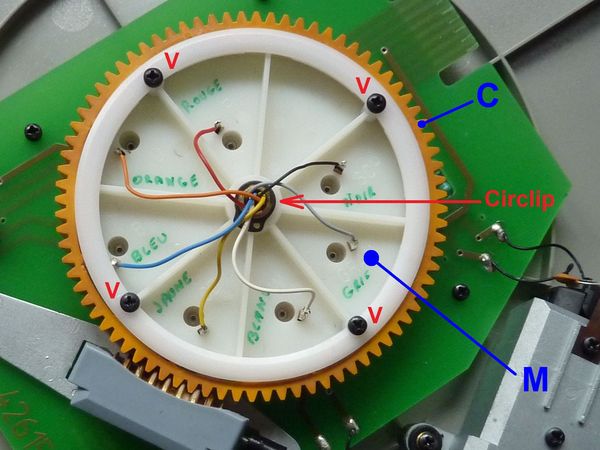
| La rotation du moteur est transmise au pont via un ensemble de vis sans fin et engrenage. L'engrenage, solidaire de la partie mobile du pont, est constitué d'une couronne dentée C entrainant par friction le moyeu M. Afin de séparer la partie mobile de la partie fixe, la première opération consiste à dessouder les fils qui alimentent cette partie mobile, après avoir repéré leur position respective (marquage en vert). Attention : Ne pas démonter les 4 vis (V) |
 |
La seconde opération consiste à enlever le circlips maintenant l'engrenage entraînant la partie mobile. |
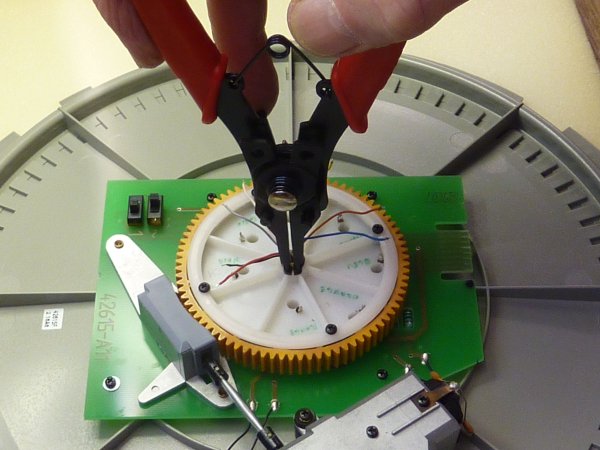 |
L'extraction de l'engrenage s'effectue en positionnant les mains en forme "d'arrache moyeu" et en effectuant de légers mouvements de traction "gauche - droite". |
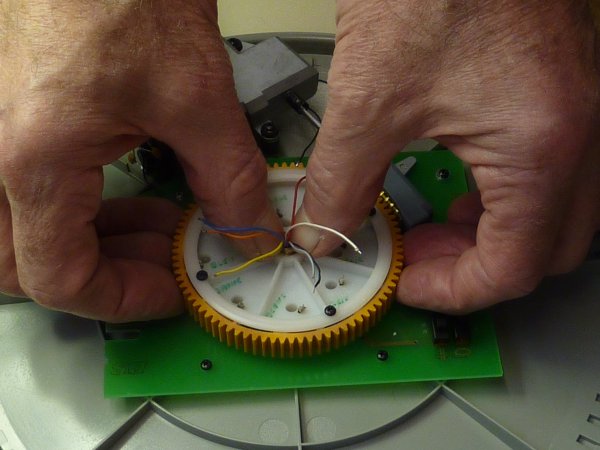 |
Dès que l'engrenage est dégagé de son moyeu, il suffit de l'enlever doucement en prenant garde de ne pas blesser les fils. |
 |
| |
|
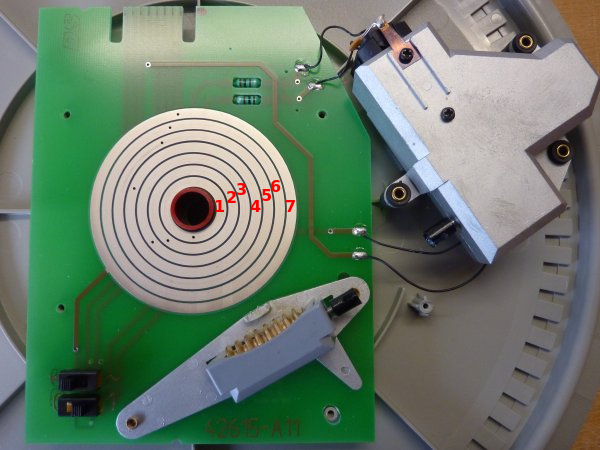
| Après extraction de l'engrenage et de la partie mobile, apparaissent les pistes qui alimentent électriquement la partie mobile du pont via des doubles frotteurs. Couleur et rôle des fils connectés à ces pistes : 1 : Rouge - Commun du switch de fin de course 2 : Noir - Rail gauche (vu coté cabine du pont) 3 - Gris - Rail droit (vu coté cabine du pont) 4 : Blanc - Contact de rail gauche 5 : Jaune - Switch de fin de course 6 : Bleu - Contact de rail droit 7 : Orange - Rail central (3 rails) |
 |
| |
|
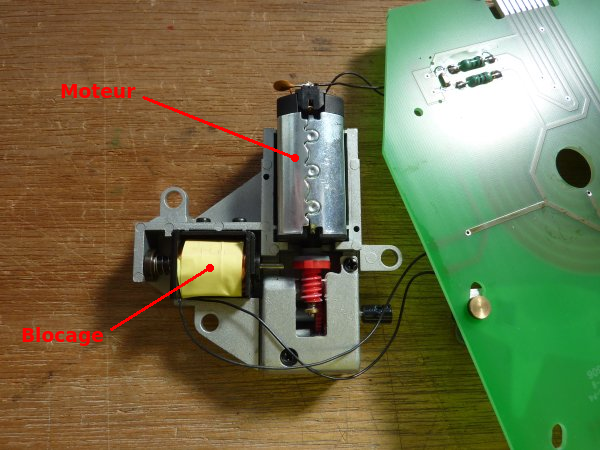
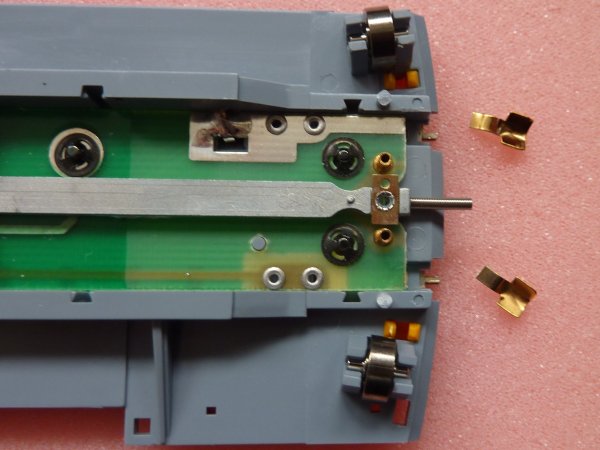
| Détail du bloc moteur comprenant le moteur et l'électroaimant de blocage inertiel. |
 |
Vue de la partie mobile du pont. |
 |
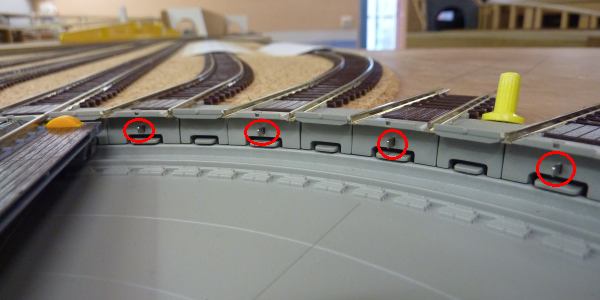
Sur la partie fixe du pont, à chaque extrémité d'un coupon de voie d'accès, est installé un ergot métallique (cercle rouge) destiné à actionner le swich de fin de course (voir image suivante). Cela a pour but d'arrêter le pont en face de la voie d'accès. |
 |
Détails d'une des extrémités de la partie mobile : CV : Contact de rail permettant la connexion entre le rail mobile et les rails fixes d'accès au pont. B : Barre de commande du switch de fin de course sur laquelle est rivée une plaquette cuivrée PC. R : Ressort détectant le petit ergot métallique situé aux extrémités des voies d'accès (voir image précédente). Lorsque le pont arrive en face d'une voie d'accès, ce ressort déplace latéralement la barre B amenant la plaquette cuivrée PC contre un des contacts fixes C |
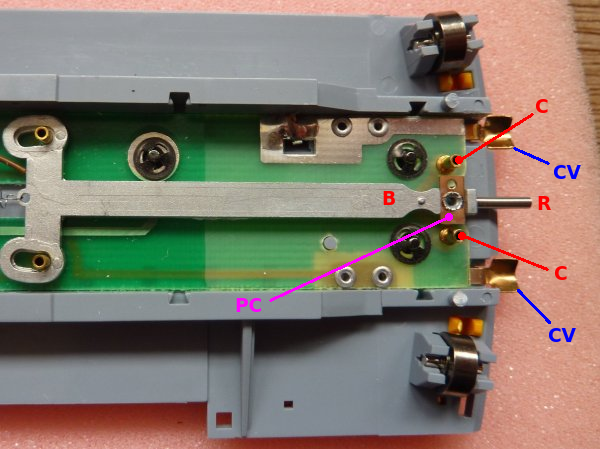 |
Dans mon cas, les contacts de rail sont inutiles et même gênants, ils seront donc supprimés. En effet, étant donné que les coupons de voie d'accès au pont seront alimentés directement par le bus DCC, il n'est plus nécessaire de prévoir ces contacts d'alimentation. De plus, ils induisent une résistance mécanique occasionnant une rotation hésitante du pont. |
 |
Voici le pont en place pour installations des voies d'accès. |
 |
Les voies d'accès au pont sont maintenant installées. Contrairement à ce qui est prévu dans la notice d'installation du pont, les coupons de voies du pont sont connectés au bus DCC et non à la partie pivotante. |
 |
Description du fonctionnement |
|
 |
|
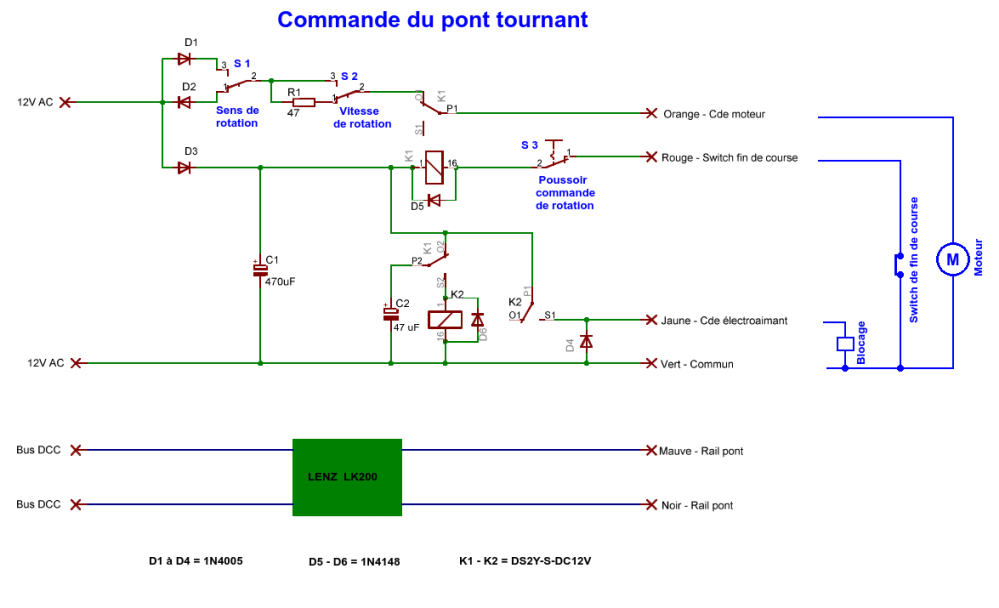
| Remarque : Les couleurs indiquées sur
le schéma ci-dessus correspondent aux couleurs des fils du câble plat qui relie le pont au circuit. (câble original Roco coupé à une extrémité) |
|
| 1 - Commande de la rotation Au repos, lorsque le pont est arrêté face à une voie d'accès, le contact "fin de course" (en bleu à droite du schéma) est fermé. Le relais K1 est alimenté et la sortie "commande moteur" est coupée. Quand on presse le poussoir S3, le relais K1 est coupé, le moteur est alimenté via le contact K1 : P1-O1 et le pont commence à tourner. Dès que le pont commence à tourner, le contact "fin de course" s'ouvre et S3 peut ainsi être relâché. Lorsque que le pont arrive face à une voie d'accès, le contact "fin de course" se ferme et K1 est de nouveau alimenté ce qui coupe l'alimentation du moteur et le pont s'arrête. S1 sélectionne les polarités (via D1 ou D2) d'alimentation du moteur et ainsi son sens de rotation. S2 alimente le moteur soit directement, soit via R1 (47 Ohms) ce qui va diminuer la tension aux bornes du moteur (chute de tension dans R1) et donc réduire sa vitesse de rotation. D3 et C1 redressent et filtrent le +12V qui alimente les relais K1 et K2. D4 est la diode de roue libre* de l'électroaimant de blocage. D5 et D6 sont les diodes de roue libre* des relais K1 et K2. *Diode de roue libre : Pour comprendre l'utilité de la diode de roue libre, il faut se souvenir de la continuité du courant dans une inductance (bobine de relais par exemple). Cela signifie que le courant dans une inductance ne peut pas être coupé brutalement sinon une surtension dangereuse apparaît (di/dt trop grand). Cette diode est donc destinée à limiter la surtension apparaissant aux bornes des relais . |
|
| 2 - Verrouillage à l'arrêt Pour éviter que le pont ne continue à tourner sur sa lancée, un système de verrouillage est prévu lors de l'arrêt du moteur. Durant la rotation du pont, le condensateur C2 se charge au +12V via le contact K1 : P2-O2. Lors de l'arrêt du pont, K1 bascule en P2-S2, le condensateur se décharge dans la bobine du relais K2. Cette décharge a pour résultat de générer une impulsion dans la bobine de K2 (quelques millisecondes). Durant cette impulsion, le contact de K2 bascule en P1-S1 et envoie ainsi une impulsion + 12V à l'électroaimant de blocage. Cette impulsion est suffisante pour arrêter la rotation inertielle du moteur. |
|
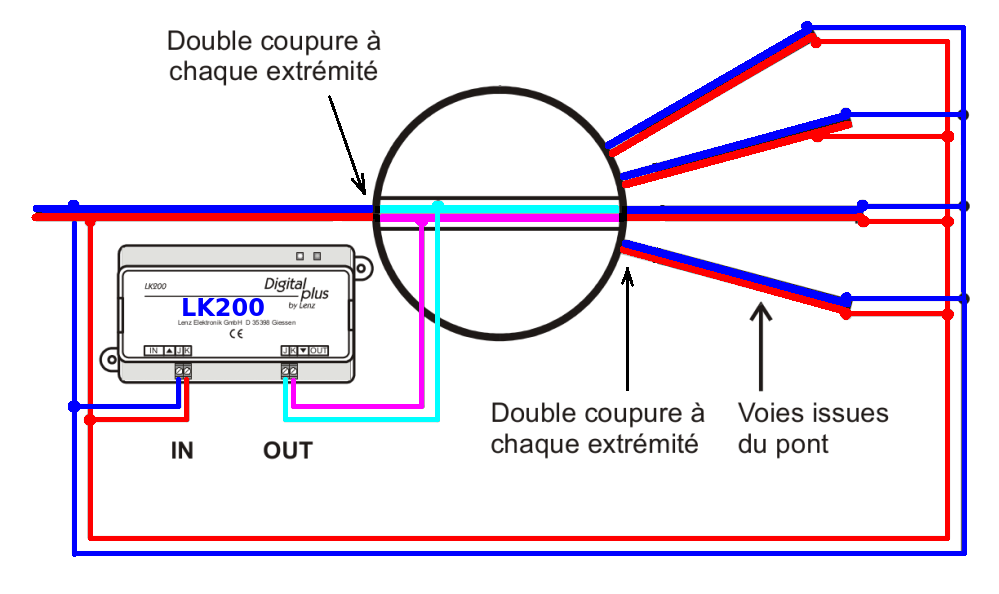
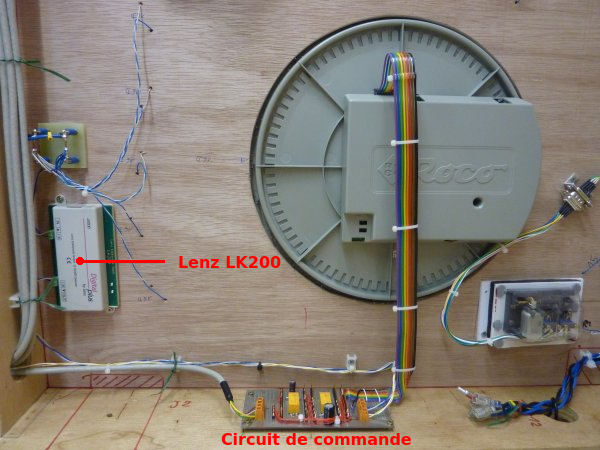
| 3 - Inversion polarités DCC Lorsque le pont tournant effectue une rotation de 1/2 tour, les polarités des rails du pont sont inversées par rapport aux polarités des rails de sortie (Voies issues du pont). Afin d'éviter un court-circuit, un inverseur de polarité DCC est inséré entre le bus DCC et les voies du pont. Attention : pour le "2 rails", ce système fonctionne uniquement en mode digital. En "2 rails analogique", si on inverse les polarités, le train repart en marche arrière. Cet inverseur de polarités (Lenz LK200) est installé comme suit : |
|
 |
|
| Vous
trouverez la notice du LK200 sur la page Téléchargement Pdf dans la rubrique "Notices" Remarque : Contrairement à ce qui est prévu dans la documentation Lenz LK200, sur ce réseau les coupons de voies du pont sont connectés aux voies issues du pont. Seules les voies mobiles du pont sont alimentées par le LK200. |
|
Voici la commande du pont : Switch de gauche : sens de rotation Switch de droite : Vitesse de rotation Poussoir : démarrage |
 |
Voici le petit circuit de commande : Il est réalisé suivant la méthode du "wire wrapping", c'est à dire des petits fils enroulés sur des pins. En effet, dans le cas d'un circuit unique, je ne prends pas la peine de réaliser un circuit imprimé. Cette méthode assez ancienne de câblage permet une réalisation rapide et beaucoup plus fiable que le "breadboard" ou tout autre procédé "bricolé". Notez sur la gauche, le câble plat reliant le circuit au pont tournant. |
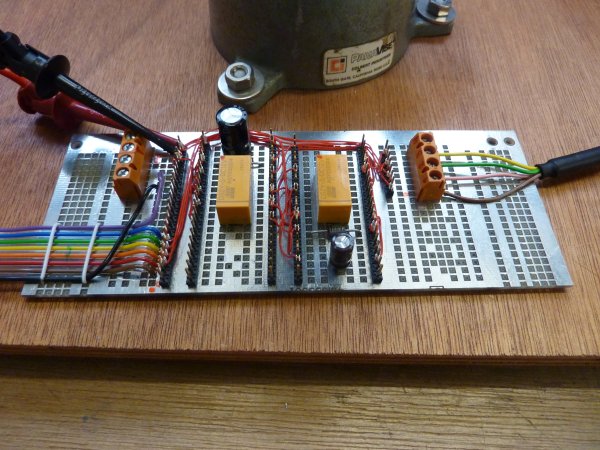 |
Test du pont avant installation définitive. |
 |
Voici le pont en place et son câblage terminé. Notez, sur la gauche, l'inverseur de polarités LK200. |
 |
|
|
|
|